2023年12月5日、JAXA(宇宙航空研究開発機構)は、9月7日に打上げられた小型月着陸実証機(SLIM)の月面着陸を2024年1月20日(土)に実施することを公表し、同日にSLIMおよび小型プローブ(LEV)に関する記者説明会を行った。
2024年1月20日(土)午前0:00頃(日本標準時)に着陸降下を開始し、同午前0:20頃(日本標準時)の月面着陸を想定している。
上記タイミングでの着陸を実施しない場合、次の着陸機会は2024年2月16日頃となる予定。
SLIM月面着陸までのスケジュール
- 2023年12月25日 月周回軌道投入
- 2024年1月中旬 着陸開始への準備開始(軌道調整)
- 2024年1月19日 着陸前軌道移行完了
- 2024年1月20日 月面着陸
会見では冒頭、宇宙科学研究所 SLIM プロジェクトチーム・プロジェクトマネージャの坂井真一郎氏(宇宙科学研究所 宇宙機応用工学研究系 教授)がSLIMのミッションや、今回のミッションで挑戦するピンポイント着陸技術の必要性やピンポイント着陸用いられる航法などについて解説した。
月面着陸に成功した後の運用についても、坂井氏により解説が行われた。
SLIMの着陸成功後には、数日程度の期間で「マルチバンド分光カメラ」を用いた岩石の組成分析が行われる予定。月マントル由来と考えられている岩石を分析することで、月の起源解明を目指すという。
また、SLIMは月着陸直前、高度2m付近に接近した段階で、2機の小型プローブ「LEV-1」「LEV-2」を分離する。これら2つのプローブは着陸後のミッション状況の観測や着陸シーンの外部からの静止画撮像、独立した通信系による地球との直接通信を行う予定。
続いて、小型プローブ「LEV-1」について、宇宙科学研究所 宇宙機応用工学研究系 教授でLEV-1担当の吉光徹雄氏が説明を行った。
LEV-1の前方と後方にはカメラがあり、ホッピングにより月面を移動、自律的に探査を行うことができるほか、取得したデータを直接地球に送信することができる。
移動手段であるホッピング動作は、地上での試験時には1mほどの高さだったといい、重力が地球の6分の1である月面では6mほど飛び上がることになるようだ。

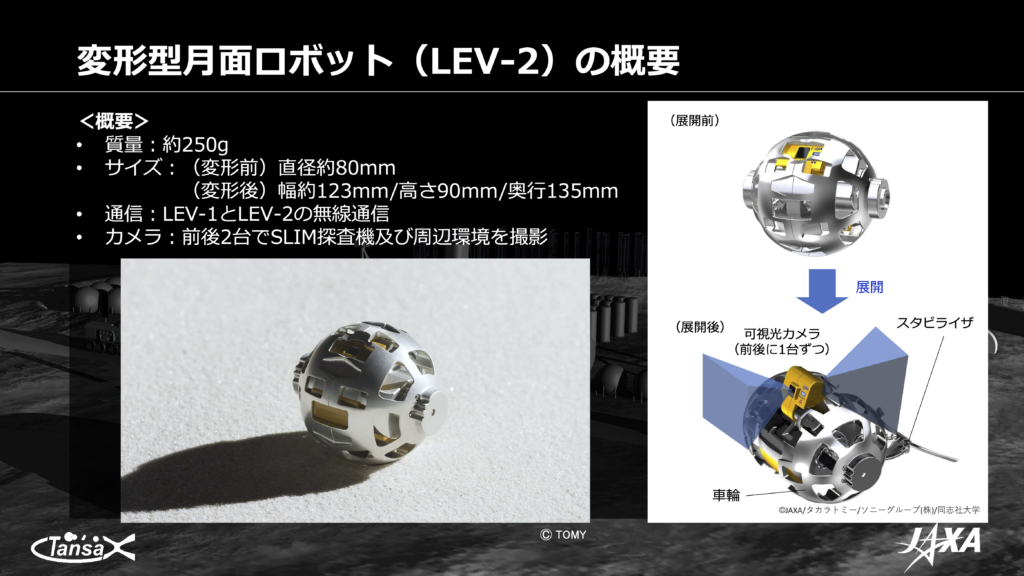
その後、変形型月面ロボット「LEV-2(愛称:SORA-Q)」の概要を、宇宙探査イノベーションハブ 主任研究開発員でLEV-2担当の平野大地氏が紹介した。
LEV-2は変形前のサイズが直径約80mm、変形後のサイズが幅約123mm/高さ90mm/奥行135mmで、変形前は球形のロボット。月面の低重力環境における超小型ロボットの探査技術を実証することがミッションの目的となっている。
LEV-2は分離され月面に着地した後、走行が可能な形態に変形、SLIMから遠ざかるように移動し、周辺の画像を撮影、画像データと走行データを無線でLEV-1に送信し、LEV-1から地上にデータが転送される流れ。
会見全体の模様は、JAXAのYouTubeチャンネルから視聴できる。